奇异值分解
本文最后更新于 2025-09-29,文章内容可能已经过时。
奇异值分解
线性代数相关知识
矩阵特征值和特征向量
定义
假设我们有一个 n 阶的矩阵 A 以及一个实数 \lambda,使得我们可以找到一个非零向量 \vec{x},使得
那么,我们称 \lambda 是矩阵 A 的一个特征值,而 \vec{x} 就是矩阵 A 的一个特征向量。
几何意义
对于一个 n 维的向量 \vec{x},我们将它乘上一个 n 维的向量 A。得到的 A \vec{x} 实际上是对 \vec{x} 进行了一个线性变换,此时 \vec{x} 的长度和方向都发生了变化(一般情况下)。
但是对于特定的矩阵 A,总是存在一些特定方向的向量 \vec{x},使得当 \vec{x} 乘以矩阵 A 时,\vec{x} 只有长度发生了变化。这个变化我们设为 \lambda 也就是矩阵 A 的一个特征值,而 \vec{x} 就是矩阵 A 的一个特征向量。
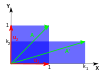
以下是矩阵 A 对于 \vec{x} 的常见线性变换的相关性质1:
| / | 缩放 | 不等缩放 | 旋转 | 水平剪切 | 双曲线旋转 |
|---|---|---|---|---|---|
| 图例 |  |
 |
 |
 |
 |
| A | \begin{bmatrix} k & 0 \\ 0 & k \end{bmatrix} | \begin{bmatrix} k_{1} & 0 \\ 0 & k_{2} \end{bmatrix} | \begin{bmatrix} \cos{\theta} & -\sin{\theta} \\ \sin{\theta} & \cos{\theta} \end{bmatrix} | \begin{bmatrix} 1 & k \\ 0 & 1 \end{bmatrix} | \begin{bmatrix} \cosh{\varphi} & \sinh{\varphi} \\ \sinh{\varphi} & \cosh{\varphi} \end{bmatrix} |
| 特征方程 | (\lambda - k)^{2} | \begin{aligned} (\lambda - k_{1})(\lambda - k_{2}) \end{aligned} | \lambda^{2} - 2\cos(\theta)\lambda + 1 | (\lambda - 1)^2 | \lambda^{2} - 2\cosh(\varphi)\lambda + 1 |
| 特征值 \lambda_i | \begin{aligned} \lambda_1 = \lambda_2 = k \end{aligned} | \lambda_1 = k_1 \\ \lambda_2 = k_2 | \begin{aligned} \lambda_1 & =e^{i \theta} \\ & =\cos \theta+i \sin \theta \\ \lambda_2 & =e^{-i \theta} \\ & =\cos \theta-i \sin \theta\end{aligned} | \begin{aligned} \lambda_1 = \lambda_2 = 1 \end{aligned} | \begin{aligned} \lambda_1 & =e^{\varphi} \\ & =\cosh \varphi+\sinh \varphi \\ \lambda_2 & =e^{-\varphi} \\ & =\cosh \varphi-\sinh \varphi\end{aligned} |
| 代数重数\begin{aligned} \mu_i = \mu(\lambda_i) \end{aligned} | \mu_1 = 2 | \mu_1 = 1 \\ \mu_2 = 1 | \mu_1 = 1 \\ \mu_2 = 1 | \mu_1 = 2 | \mu_1 = 1 \\ \mu_2 = 1 |
| 几何重数\begin{aligned} \gamma_i = \gamma(\lambda_i) \end{aligned} | \gamma_1 = 2 | \gamma_1 = 1 \\ \gamma_2 = 1 | \gamma_1 = 1 \\ \gamma_2 = 1 | \gamma_1 = 1 | \gamma_1 = 1 \\ \gamma_2 = 1 |
| 特征向量 | 所有非零向量 | \begin{aligned} & \mathbf{u}_1=\left[\begin{array}{c}1 \\ 0\end{array}\right] \\ & \mathbf{u}_2=\left[\begin{array}{c}0 \\ 1\end{array}\right]\end{aligned} | \begin{aligned} & \mathbf{u}_1=\left[\begin{array}{c}1 \\ -i\end{array}\right] \\ & \mathbf{u}_2=\left[\begin{array}{c}1 \\ +i\end{array}\right]\end{aligned} | \mathbf{u}_1=\left[\begin{array}{l}1 \\ 0\end{array}\right] | \begin{aligned} & \mathbf{u}_1=\left[\begin{array}{l}1 \\ 1\end{array}\right] \\ & \mathbf{u}_2=\left[\begin{array}{c}1 \\ -1\end{array}\right]\end{aligned} |
特征方程的推导
对于公式 (1),移项得:
由于 \vec{x} 是一个非零向量,即 \vec{x} = E \times \vec{x} (E 为单位矩阵)因此我们可以将公式 (2) 写成:
\vec{x} = \vec{0} 时,式子显然成立,于是我们讨论 \vec{x} \neq \vec{0} 的情况。
于是我们可以得到 |A - \lambda E| = 0,即为特征方程。
假设:
则可以求得最多 n 个特征值 \lambda_i ~ \{i \mid i = 1, 2, \cdots, m (m \leq n) \}。
特征值相关性质:
- \lambda_1 + \lambda_2 + \cdots + \lambda_n = a_{11} + a_{22} + \cdots + a_{nn}
- \lambda_1 \lambda_2 \cdots \lambda_n = |A - \lambda E|
- A^2\mathbb{x} = A(A\mathbb{x}) = A(\lambda \mathbb{x}) = \lambda(A\mathbb{x}) = \lambda^2 \mathbb{x} \Rightarrow \color{FFC340}{A^kx = \lambda^k} x
特征向量求解
对于给定的特征值 \lambda_i,我们可以使用基础解系法求得对应的特征向量 \vec{x}_i。
假设:
则有:
我们将 A - \lambda_i E 化成行最简型,然后将相应的特征向量求解出来即可。
\vec{x}_i 是 A 的特征向量,当且仅当 \vec{x}_i 是 A - \lambda_i E 的特征向量
使用python求解特征值和特征向量
python 中的 numpy.linalg.eig() 函数可以很方便地求解特征值和特征向量。
例如,对于下面的矩阵:
我们可以使用以下代码进行求解:
import numpy as np
a = np.mat([[3, 1], [1, 3]])
lam, x = np.linalg.eig(a)
结果如下:
lam: array([4., 2.])
x: matrix([[ 0.70710678, -0.70710678],
[ 0.70710678, 0.70710678]])
相似矩阵
相似矩阵(Similar Matrix)是两个矩阵 A 和 B,使得它们满足 B = M^{-1}AM(其中 M 是一个可逆矩阵)。那么我们就称 B 和 A 相似。
我们可以这样理解,设 \vec{x} 是一个非零 n 维向量,设有如下式子:
化简可以得到:
也就是说矩阵 A 和矩阵 B 具有相同的特征值 \lambda,而特征向量不一定相同。
特征值分解
对于一个 n \times n 的矩阵 A(一般情况下,矩阵 A 应该有 n 阶),可以分解成如下形式:
其中 \Lambda 是 n \times n 的对角矩阵,其对角线上的元素满足以下关系(\lambda_i 是矩阵 A 的特征值):
那么我们为什么可以使用式 (7) 来表示矩阵 A 呢?
对于式 (1),我们这样理解:矩阵 A 对向量 \vec{x} 的变换效果只有拉伸,而并没有旋转。
也可以说,对于一个 n \times n 的矩阵 A,应该存在 n 个非零的特征向量使得式 (1) 成立。
对于式 (1) 的完备形式:
可以得到如下式子:
也就是可以转化成式 (7) 的形式。
SVD奇异值分解
奇异值分解(Singular Value Decomposition,SVD) 是在机器学习领域广泛应用的算法,它不光可以用于降维算法中的特征分解,还可以用于推荐系统,以及自然语言处理等领域。
为什么使用奇异值分解算法?
(1) 特征值分解仅适用于提取方阵特征,但实际场景应用中大部分数据都不是方阵;
(2) 数据可能是有许多 “0” 值的稀疏矩阵,因此我们需要提取主要特征值。
(3) 奇异值分解可以将复杂的矩阵分解成简单的子矩阵,通过子矩阵来描述复杂矩阵的特性。
预备知识
对于一个 m \times n 矩阵 A 来说,A^T 是矩阵 A 的转置矩阵,A^H 是矩阵 A 的共轭转置矩阵2。
其中,A^H 有以下定义:
- 共轭转置是在转置的基础上,对复数矩阵中的每一个元素取复共轭。
- 对于实数矩阵,共轭转置矩阵与原矩阵相同。
- 对于复数矩阵,共轭转置矩阵会将矩阵中的元素取复共轭,然后对行列进行转置。
若一个矩阵 A 满足 A^H A = A A^H = I(I 为单位矩阵),那么我们称矩阵 A 为酉矩阵(幺正矩阵)。若矩阵 A 是定义在实数域中,那么酉矩阵就叫实正交矩阵。
酉矩阵性质:
(1) A^H A = A A^H = E;
(2) A^H = A^{-1};
(3) |det A| = 1;
(4) 对于任意向量 x,有\Vert Ax \Vert_2 = \Vert x \Vert_2.
奇异值定义
对于一个 m \times n 的矩阵 A,我们设 rank(A) = r,A^H A 的特征值为 \lambda_1, \lambda_2, \cdots, \lambda_n (\lambda_k = 0, k > r),则矩阵 A 的奇异值定义为:
- 其中,\lambda_1 \geq \lambda_2 \geq \cdots \geq \lambda_n \geq 0,U 和 V 都是酉矩阵,即满足 U^T U = V^T V = E.
那么为什么要大费周章使用 A^H A 的特征值来定义奇异值呢?
对于实数矩阵 A_{m \times n},我们不能直接求它的特征值,但对于 A^T A 和 A A^T,分别为 n 阶和 m 阶对称方阵。他们的秩 R(A^T A) = R(A A^T) = R(A),且两个对称矩阵的非零特征值相同,这两个对称矩阵的特征值矩阵是正交矩阵,特征值均为正实数,因此可以得到如下关系:特征值的平方根 = 奇异值。
奇异值分解公式推导
SVD 的核心就是找到一组 A 的行空间中正交基 v_1, v_2, \cdots, v_n,使得:
其中 u_1, u_2, \cdots, u_n 是一组在 A 的列空间中的正交基。写成矩阵形式:AV = U\Sigma。实际上特征值分解是SVD的一个特例。
将矩阵同时右乘 V^{-1} 可以得到式 (9),即 A = U \Sigma V^T。
接下来我们将对于如何计算奇异值分解进行讨论。
如果我们将 A^T 和 A 做矩阵乘法,那么会得到一个 n \times n 的方阵 A^T A,以及一个 m \times m 的方阵 A A^T。
那么我们将其进行特征值分解:
可以求出相应的特征值和特征向量。
将所有的特征向量 v_i 合并成 n \times n 的矩阵 V,将所有的特征向量 u_i 合并成 m \times m 的矩阵 U,即:
一般我们将矩阵 V 中的每个特征向量叫做矩阵 A 的右奇异向量,将矩阵 U 中的每个特征向量叫做矩阵 A 的左奇异向量。(其实就是式 (9) 中的相对位置)
接下来我们将对奇异值矩阵 \Sigma 进行相应求解。
我们将式 (9) 同时左乘一个 A^T 则:
由于矩阵 U 和 V 都是酉矩阵,并且矩阵 \Sigma 是对角阵,所以:
同理,我们可以求出:
我们可以发现此时满足 “A = Q \Lambda Q^{-1}” 的形式,即特征值分解。由于 A A^T(或 A^T A)的特征值为:
于是可以得到以下等价式子:
使用python进行奇异值分解
使用 numpy库中的 numpy.linalg.svd()函数可以很方便的求解特征值和特征向量。
例如,对于下面的矩阵:
我们可以使用以下代码进行求解:
import numpy as np
A = np.array([[1, 2], [3, 4]])
U, s, V = np.linalg.svd(A)
运行结果如下:
U: matrix([[-0.40455358, -0.9145143 ],
[-0.9145143 , 0.40455358]])
s: array([5.4649857, 0.36596619])
V: matrix([[-0.57604844, -0.81741556],
[ 0.81741556, -0.57604844]])
实际运用
SVD 主要用于降维,即把一个高维度的矩阵通过某种方式映射到低维度的矩阵。
在分解成 U, \Sigma, V 之后,由于 \Sigma 是单调递减的,也就是说越往后权值越小,于是我们可以选择其中的一部分,而舍弃掉权值较小的那些特征值,达到降维的效果。
以下是使用 SVD 进行图片压缩的例子:
这是压缩前的图片:
这是压缩后的图片:
")
SVD分解结果如下: